⚙️Tracking and PTZ Parameter Fine-tune Guide

The fine-tuning process is only supported under the ExPelcoD protocol.
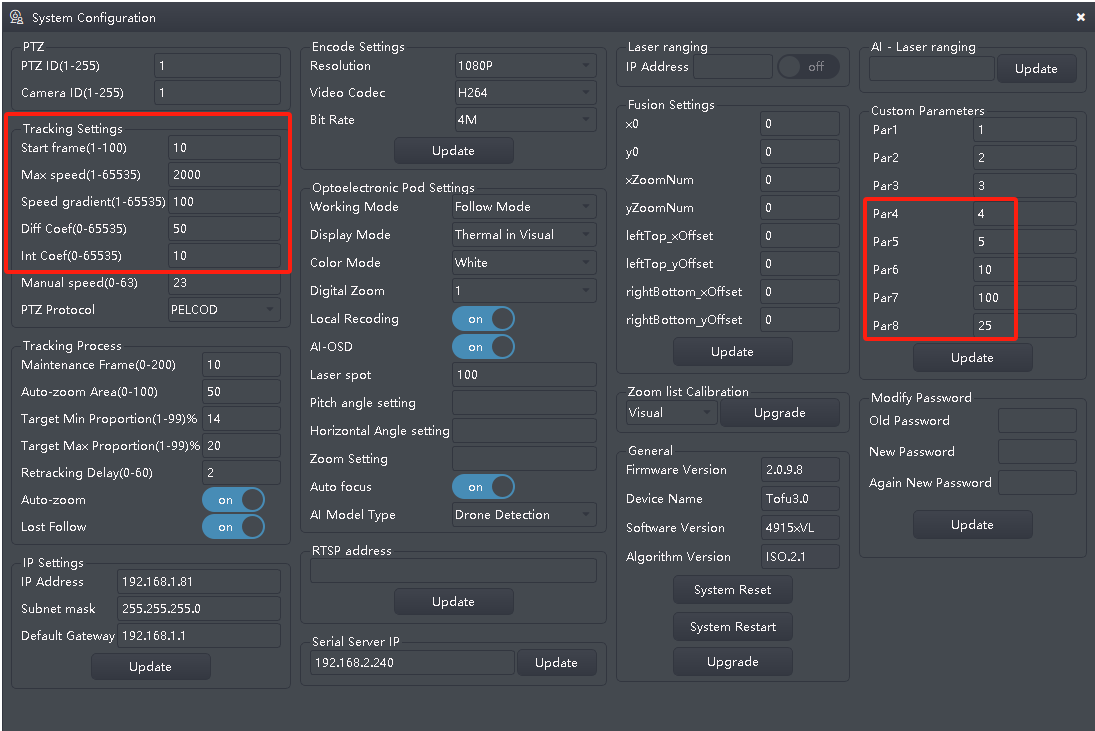
At this point, the custom parameter area is used.
There are a total of 8 custom parameters, and only param4, 6, and 7 parameters are used in the fine-tuning process. Please do not modify any other parameters.
The steps are as follows:
-
- First, ensure that the Zoom list tableof the device camera is matched and imported into the Tofu device.
-
- Use the ROI tracking mode, set the Max speed to 65535 under static background, that is, unlimited state. Set the Diff Coef to 1000, and do not set the Speed gradient and Int Coef to default. Now, enter the fine tuning static parameter mode.
In the tracking mode of ROI tracking, adjust the lens magnification to 1x. Par4 is the value obtained by rounding the <horizontal speed * 10.0 /vertical speed of the gimbal>. The specific value is determined by the gimbal's own speed configuration. Maintain a fixed value in the future.
- Use the ROI tracking mode, set the Max speed to 65535 under static background, that is, unlimited state. Set the Diff Coef to 1000, and do not set the Speed gradient and Int Coef to default. Now, enter the fine tuning static parameter mode.
-
- par6 and par7 are in a 1:10 ratio, with par7 as an interval of 100, gradually rising. Track the objects, in boundary of the frame area and 1/4 of the frame, to see the tracking effect. After setting the parameters, you need to click "Update" to take effect. After obtaining the approximate effect, fine adjustments can be made at intervals of 10 or 100.
-
- When the selected object in the screen can be centered within 2 seconds without losing tracking, it means that the par7 parameter has been adjusted.
-
- Adjust par6 within the range of 1/5 to 1/20. If there is oscillation after centering, reduce it; if the centering is not sufficient, increase it.
-
- Taking the gimbal subdivided by 0.01° as an example, the empirical values of par6 and par7 are 5 and 260 respectively;
Taking the 0.001° subdivision of the gimbal as an example, the empirical values of par6 and par7 are 400 and 3600. The above data is for reference only.
- Taking the gimbal subdivided by 0.01° as an example, the empirical values of par6 and par7 are 5 and 260 respectively;
-
- After adjusting par6 and par7 in the above steps, update and save the parameters Adjust the Diff Coef to 0, which means turn off the static parameters. Start adjusting dynamic parameters.
It is recommended to adjust dynamic parameters when there is a moving target, and parameters tested in static scenes can be fine tuned under the moving target to better adapt.
- After adjusting par6 and par7 in the above steps, update and save the parameters Adjust the Diff Coef to 0, which means turn off the static parameters. Start adjusting dynamic parameters.
-
- Speed gradient increases gradually at intervals of 100, and tracks objects, in the boundary of the frame and 1/4 of the frame. Check the object's centering time and overshoot status. Overshoot refers to the phenomenon where the selected target continues to move away from the center point after reaching the center position. When there is a slight overshoot, the increase in motion coefficient can be stopped. When the speed subdivision is not small enough, the motion coefficient can be reduced and the interval increased.
The motion coefficient is generally similar to par7.
- Speed gradient increases gradually at intervals of 100, and tracks objects, in the boundary of the frame and 1/4 of the frame. Check the object's centering time and overshoot status. Overshoot refers to the phenomenon where the selected target continues to move away from the center point after reaching the center position. When there is a slight overshoot, the increase in motion coefficient can be stopped. When the speed subdivision is not small enough, the motion coefficient can be reduced and the interval increased.
-
- Increase the Int Coeft to adjust the centering of the target, which can generally be set to 1/10 or 1/20 of the Speed gradient.
-
- The maximum speed is limited to 3-10 times the Speed gradient.
-
- Change the Diff Coef to 50.
If you want to achieve excellent tracking centering and use a third-party servo, we can provide you with independent servo precise parameter adjustment technical services. Accurate parameter tuning technology services require remote operation after our technical evaluation or the customer providing physical equipment, replacing independent precision tuning tracking algorithms, and providing them after parameter calibration. This service is a one-time service, and there is no need to recalibrate the same type of servo
